文/ 李牧 王文庆
摘要:近年来,无人机技术高速迭代,在产生良好应用示范效果的同时也为公共安全带来了一定威胁。本文从无人机分类入手,分析了低空无人机的特点,并从低空威胁角度考虑了无人机的具体危害,旨在为无人机管控提供一些发展思路及建议。
关键词:无人机 分类 特点 威胁
1 引言
目前,以“低慢小”为特点的低空无人驾驶航空器(以下简称低空无人机)技术发展迅猛,特别是2012年以来,民用低空无人机在世界各地、各领域得到广泛应用,呈现爆发式增长。其机动灵活、快速响应的特定,在各个行业中均起到了推动作用。
无人机的热门程度呈爆发性增长,它们的工作能力也在迅速提高。遗憾的是,事实表明,它们也成为了犯罪活动(例如,将手机、武器和毒品运送给监狱中的囚犯)、非法监视甚至是恐怖袭击的有用工具。
2 无人机分类
为了对无人机进行详细分析,并相应地考虑对此类装备的管控,本文首先对市场上现有无人机进行如下分类。
2.1 根据机型分类
从无人机机型角度,行业上通常可对无人机进行如下三种分类:
(1)多旋翼无人机:具有3个及以上旋翼,能垂直起降、自由悬停的无人驾驶航空器。
(2)固定翼无人机:由固定机翼产生升力的无人驾驶航空器。
(3)无人直升机:具有一个或两个旋翼,能垂直起降、自由悬停的无人驾驶航空器。
2.2 根据频率分类
为了从无线电频谱角度对无人机进行分析,我们可以对无人机按频率进行分类,目前用于低空无人机操控和数据传输的载波频段主要集中在以下频段。
2.2.1 433MHz频段
该频段为开放频段,多见于固定翼无人机及小型航模类无人机,具有较强的绕射和散射能力,非常有利于无人机远程图像传输。其硬件产品技术性能成熟可靠,各类无线产品种类丰富,但同时也带来频段资源紧张、同频干扰的问题,特别是大功率远距离传输设备对此频段干扰非常严重。
2.2.2 800MHz、1.4GHz、2.4GHz频段
2015年,工信部根据《中华人民共和国无线电频率划分规定》及我国频谱使用情况,将840.5-845MHz、1430-1444MHz和2408-2440MHz频段规划用于无人驾驶航空器系统。其中2.4GHz频段为目前最常用的飞控和图传频段。
2.2.3 900MHz和2.5GHz
该2频段均用于无人机飞控数据传输,其中前一个为无人机行业初期常用频段。
2.2.4 1.2GHz
该频段多用于无人机图像传输,具有较好的图像传输效果。
2.2.5 1.5-1.6GHz
该频段多用于各类导航系统,如GPS、GLONASS、Galileo、北斗等,通常为单向接收链路,无人机对此频段的信息以接收为主,很少存在此频段的双向通讯。
2.2.6 5.8GHz
随着2.4G频段频率资源日益紧张和新技术的发展,5.8GHz大有取代2.4GHz频段的趋势,目前我国在售的消费级无人机多采用此频段作为图传/数传频段。
2.3 根据飞控类型分类
无人机区别于航模的一个特点就在于无人机具有完整且智能化的飞控(飞行控制系统)。对采用不同飞控类型的无人机而言,可按如下方式进行划分。
2.3.1 实时遥控系统
实时遥控系统是指无人机飞手通过肉眼直接观测或利用无人机回传的图传信号判断无人机的位置、飞行姿态等信息,利用遥控器实时控制无人机飞行轨迹的控制类型。
2.3.2 航迹规划系统
航迹规划系统是指无人机在初始位置、终止位置和一些目标任务结点确定之后的航迹优化问题,其基本功能是根据无人机的性能和飞经的地理环境、威胁环境和限定条件等因素,对已知或潜在的目标规划出若干条满足要求的航迹,实际飞行时可以根据需要进行实时局部修改。
2.3.3 组合惯性导航系统
组合惯性导航是指将飞机和舰船等运载体上的两种或两种以上的导航设备组合在一起的导航系统,该系统将逐渐取代旧有的单一惯性导航系统。
(1)卫星/惯性导航系统组合:通过卫星定位系统信息定时对惯性系统进行偏差纠正。在无法接受卫星信号时,该系统也能够保障信息在一定时间内的精准度,其精度高、可通讯,但需要从外界获取信息。
(2)天文/惯性导航系统组合:一是利用惯性导航和天文导航系统位置信息差值来校正的组合方法,给出工程应用的实际结果;二是根据天文导航系统观测天体的高度、方位值,依据天文原理计算两者之差作为观测卡尔曼滤波组合;三是确定产台坐标系在惯性坐标中跟踪地理坐标系的误差作为观测卡尔曼滤波组合,最后采用天文导航位置信息对陀螺常值漂移的校正。
(3)GPS/INS导航系统组合:该组合能良好实现惯性传感器的校准、惯导系统的空中对准和高度稳定性等,从而提高惯导系统的性能、精度、跟踪卫星的能力,同时还可实现GPS完整性检测,提高可靠性,实现一体化。
(4)惯性导航/多普勒组合:该组合同时解决了多普勒受地形影响的因素及惯性导航自身的误差,实现了互补效果。
(5)惯性导航/地磁组合导航系统:该组合自主性强、隐蔽性好、成本低、可用范围广,是当前惯性导航系统研究领域的热点。
(6)惯性导航/地形匹配组合导航系统:为达到地形匹配的定位精度高的要求,利用改组合消除长时间工作的误差累计,从而提高惯性导航的定位精度。
(7)GPS/航迹推算组合导航系统:在GPS失效的情况下,根据大气数据利用航迹推算可测得空速,推算出地速和航迹角。当信号中断或质量差时,由航迹确定位置;当信号质量好时,利用GPS定位确定位置,有效控制系统成本。
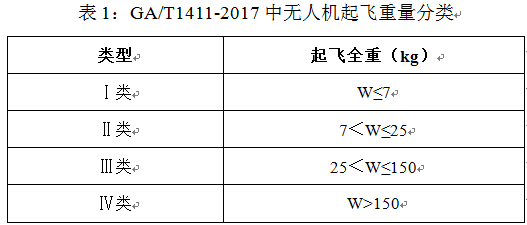
2.3.4 根据起飞重量分类
近年来,我国民航为规范民用无人机管理,按照无人机起飞重量不同,在《民用无人驾驶航空器系统驾驶员管理暂行规定》一文中对无人机进行了分类,后续我国公安行业标准GA/T 1411-2017《警用无人驾驶航空器系统》也沿用了这一分类方法。
2.3.5 根据航程的远近分类
在无人机应用领域,通常的做法是对无人机按照航程的远近进行分类:
(1)近程类:航程50km,续航时间1h~6h,执行全天候侦察监视任务;
(2)短程类:航程300km,续航时间8 h~12h,执行全天候侦察监视任务;
(3)中程类:活动半径650km,无需在空中巡逻,仅用于昼夜侦察、监视;
(4)高空长航时类:至少续航36h,飞行高度在9km以上,执行全天候侦察、通信中继任务,并能在强风中保持平稳。
3 低空无人机特点
在前文考虑低空无人机分类的基础上,下文将主要对低空飞行无人机特点进行详细分析。
3.1 无线电频谱特点
3.1.1 载波频段划分
2015年工信部根据《中华人民共和国无线电频率划分规定》及我国频谱使用情况,规划840.5-845MHz、1430-1444MHz和2408-2440MHz频段用于无人驾驶航空器系统。目前市场上大部分民用无人机,如大疆PHANTON系列、亿航GHOSTDRONE、智行天眼无人机等均采用2.4GHz频段进行通讯数据传输或者图像传输。此外,由于该产业的发展领先于相关行业规范的制定,现有部分民用无人机还使用了上述规定范围以外的传输频率,实际使用频率为以下10个频段:840.5-845MHz、1430-1444MHz、2408-2440MHz、5725-58754MHz、328-352MHz、400-433MHz、560-760MHz、915MHz、933MHz、1200 MHz。
3.1.2 常见图传的编码方式及特点
(1)COFDM(coded orthogonal frequency division multiplexing),即编码正交频分复用的简称,其基本原理就是将高速数据流通过串并转换,分配到传输速率较低的若干子信道中进行传输。COFDM技术在无线图像传输方面应用有以下独特的优势:
◆适用于“非视距”“绕射”传输优势,用于城区、山地、建筑物内外等不可视及有阻挡的环境中;
◆适合于高速移动中无线传输实时的图像,可在车辆、船舶、直升机等平台上使用,传输可靠性及性价比高;
◆ 传输带宽高,适合于高码流、高画质的音视频传输,图像码流一般可大于4M bps,完全可满足接收端后期音视频分析、存储、编辑等具体的要求;
◆在复杂电磁环境中具备优异的抗干扰性能,通过各个子载波的联合编码,具有很强的抗衰落能力。
(2)CCK 补码键控(Complementary Code Keying),CCK是一种软扩频技术,是802.11标准中的1Mb/s和2Mb/s速率的高速扩展方式,传输速率可以达到5.5 Mb/s和11 Mb/s,其补码序列具有良好的对称性和相关性,在接收端采用了Rake接收机,整个系统能够克服传输过程中的多径效应和频率选择性衰落。
(3)点频、Wifi数据传输方式:
◆点频数据传输方式:是由信号源发出单一频率的连续波信号实现的单点频测试方法。
◆Wifi数据传输方式:基于IEEE 802.11标准的无线局域网技术,广泛应用于各类电子终端产品的数据传输,是目前最为常见的无线网络传输技术。
(4)无线电静默:多见于固定翼无人机执行特定的飞行任务时,采用的某种飞行方式,即因为安全、保密或其他理由,某一区域固定式或移动式的无线电发射设备不发送信号。
3.2 雷达反射特点
低空无人机的雷达反射截面积(RCS)数值远远小于传统载人的飞行器的数值,最小约为0.01m2,根据国外的测试数据3DR SOLO的RCS数值约为0.0038 m2,而DJI inspire1的RCS也不过0.043m2,这就造成了低空无人机很难为传统雷达探测和识别。此外,因无人机慢速飞行状态或悬停状态,不具备普通运动目标的多普勒特征,采用传统方法对其探测难以奏效。
3.3 光学特性
低空无人机通常体积小巧,光学漫反射面积小,例如常见的多旋翼无人机轴距基本位于300mm—600mm范围内,在100m高的空中飞行时,肉眼很难发现;2017年挪威普罗科斯动力公司研制的PD-100型黑色大黄蜂纳米无人机只有2.5cm高,旋翼直径为10cm,在距离9m以外的位置飞行时凭肉眼很难发现,隐蔽性非常好。其飞行特征不同于飞鸟和气球,无人机的垂直移动速度要慢于飞鸟的俯冲下降速度,而气球类的水平移动和垂直移动速度均慢于无人机速度。
3.4 声学特性
现有的无人机几乎都采用桨叶结构,这就决定了其会因为桨叶的旋转产生一定的噪音,因此也具有了可探测的特性。
多旋翼无人机飞行时声音通常较小,按照GA/T 1411.3-2017《警用无人驾驶航空器系统 第3部分:多旋翼无人驾驶航空器系统》规定,25Kg以内的多旋翼无人机,在40m飞行高度上工作噪声小于60分贝。在实际生活中,40-60分贝属于我们正常的交谈声音。相比而言,固定翼、直升机声音在40-50m飞行高度上通常在65分贝以上,因此发现距离通常较远。
4 低空无人机的安全威胁
低空无人机通常是指飞行高度在1500m以下、飞行速度低于200km/h、雷达反射面积小于2m2,具有“低空飞行、飞行速度较慢、不易被雷达发现”等全部或者部分特征的低空无人机,同传统无人机相比具有难发现、难捕捉、难应对的特点,低空无人机的非法使用会给国家安全和公众正常生活带来巨大威胁。

4.1 拍照与窃听
无人机挂载航拍摄像机和定向拾音麦克风可以在高空偷窥和窃听,对百姓生活和一些涉及国家秘密的机构单位产生严重威胁。

4.2 投掷危险物品
目前小型无人机的负载即可达到几十公斤,如果携带小型炸弹、燃烧弹和危险化学品等,将会对公众安全带来严重威胁。

4.3 影响民航的起降
无人机非法在机场等附近飞行,将严重影响正常飞行秩序,甚至影响乘客和机组人员的安全。国内的成都双流机场、北京首都机场、杭州萧山机场、重庆江北机场等发生过多起无人机非法入侵事件,仅2017年,在英国就发生了92次无人机与航班险些相撞的事件。
发生在英国的盖特威克机场关闭事件,就是最为典型的例子:2018年12月19日晚,英国第二大机场盖特威克机场遭无人机干扰后停止运营超过30小时。由于临近圣诞假期,事件造成大约12万名旅客滞留机场。然而,还未等这起无人机擅闯机场事件调查完毕,21日,刚刚恢复运营的盖特威克机场再遭无人机干扰,导致航班再度停飞。

4.4 携带违禁品
通过小型无人机在边境走私货物甚至毒品,会威胁边境秩序,影响国内市场和人民群众生命健康安全,在美国和墨西哥边境,利用无人机运输违禁品成为新的传输渠道。
4.5 从事非法宣传
极端分子利用无人机散播传单和悬挂标语方式,严重影响社会正常秩序和国家形象。
5 结语
无人机作为热门的新兴产业,在保证发展需要的同时,又要消除“黑飞”低空无人机对公共安全的威胁,我国对无人机的管理需要多部门协作配合,从法律角度对整个行业,由生产、销售、使用整个链条的各个环节全方面有效监管,才能让民用无人机产业健康发展,为社会经济发展贡献力量。
参考文献
[1] 李牧,谢峰等. 警用无人机激光拦截系统设计与分析[J]. 中国安全防范认证, 2016(6):15-17.
[2] 李牧,相里晓君等. 无人机定向干扰拦截技术及设备解析[J]. 警察技术,2018,(5).
[3] 肖聪. 无线电信号压制性干扰研究与验证[D]. 电子科技大学,硕士学位论文,2010,(5).
[4] David L.Adamy,杨才义等译. 通信电子战[M]. 北京:电子工业出版社,2017.
[5] (美) Richard A. Poisel, 无则平等译. 通信电子战系统导论[M].北京: 电子工业出版社,2003.
[6] 樊昌信,曹丽娜. 通信原理(第6版)[M].北京:国防工业出版社,2007.
声明:本文来自公安部检测中心,版权归作者所有。文章内容仅代表作者独立观点,不代表安全内参立场,转载目的在于传递更多信息。如有侵权,请联系 anquanneican@163.com。
