笔记作者:CDra90n@SecQuan
原文作者:Siddharth Dongre,Hanif Rahbari
原文会议:ACM WiSec 2021
原文地址:http://rahbari.csec.rit.edu/papers/wisec21_v2v.pdf
越来越多的车对车 (V2V) 通信部署预计将显着增加高速公路和密集道路中基本安全信息 (BSM) 的数量。因此,验证 BSM 完整性的计算开销会很高,而当前的 V2V 设备每秒只能处理有限数量的 BSM。因此,携带重要信息的关键 BSM 可能无法及时处理,从而产生不安全的结果。在这篇论文中发现了这个漏洞并讨论了关键场景,开发了利用这个漏洞的新攻击方法,并提出了一种筛选技术来缓解这些智能阻塞攻击(smart gridlock attack)。在 USRP 测试台上表明,提出的用于对抗利用此漏洞的复杂攻击者的筛选机制在 SNR 大于 6 dB 时实现了 80% 的准确率,从而有效地减轻了攻击。
0x01 Introduction
在车对车 (V2V) 通信中,车辆之间相互通信以增强其安全性和接近感知。每辆车都会定期广播基本安全消息 (BSM) 以宣布其当前的运动状态,包括其速度、运动方向、加速度和位置。因此,一些 BSM 可能充当旨在防止即将发生的事故的警告消息。最近的趋势表明,配备 V2V 的车辆数量正在增加。因此,随着越来越多的车辆依赖 BSM 进行操作,这些警告 BSM 变得更加重要。然而,在密集的道路上,大量 BSM 的传输会在接收车辆时造成处理瓶颈。如果关键 BSM 未能及时处理,这可能会产生潜在的有害结果。例如,在纽约州罗彻斯特郊外的 I-490 高速公路的高峰时段,车辆碰撞的可能性很高,基于 I-490 当前交通数据的传输 BSM 的预计数量很容易超过最先进的 V2V 芯片组,如下图所示。
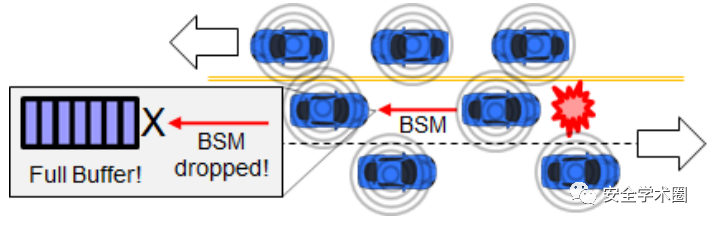
接收车辆的处理瓶颈部分是由于数字签名的验证。美国国家公路交通安全管理局 (NHTSA) 要求使用带有证书的数字签名来验证 BSM 的发送者并验证其内容的完整性。这可确保 BSM 来自合法车辆,而不是恶意发射器,并且不会在传输过程中被篡改。尽管这种验证对于 V2V 系统的安全性至关重要,但不幸的是,它增加了接收车辆的额外计算开销。这种开销反过来可能会影响接收车辆上 BSM 的可用性。理想情况下,每个 BSM 应在收到后立即处理。现代 V2V 设备中使用的芯片组能够每秒验证多达 2500 个 BSM。本文表明这个上限不足以处理现实密集道路中的所有 BSM,从而造成 BSM阻塞状态。结果,接收器无法处理所有接收到的 BSM,这意味着它会在给定的时间间隔内丢弃 BSM 的任意子集,如果丢弃的 BSM 包含关键消息,这可能会导致不安全的结果。
可以考虑通过应用 BSM 过滤器来缓解此 BSM 瓶颈漏洞,该过滤器在执行签名验证之前丢弃非关键 BSM。尽管这是一种很有前途的方法,但一旦攻击者试图主动绕过它,朴素过滤器的性能就会很差,从而使接收器无法处理所有关键的 BSM。进一步确定了在不同环境中具有严重后果的攻击场景。因此,过滤器需要复杂性才能有效抵御简单的攻击,例如简单地发送一连串恶意 BSM,还需要有效抵御试图绕过简单过滤器的智能攻击。设计有效的过滤器需要解决两个主要挑战。第一个挑战是它需要快速可靠地区分关键 BSM 和非关键 BSM。其次,过滤器需要足够强大,以区分恶意 BSM 和良性车辆发送的 BSM。
为了应对这些挑战,首先需要量化最关键的 BSM,并根据每个 BSM 旨在防止的场景的严重性来了解这些 BSM 的重要性,还将特定位置确定为此类关键场景的代表性示例。这可以进一步用于评估过滤器的有效性。为此,使用美国交通部 (DoT) 的车辆使用数据,然后将这些数据输入高级交通模拟软件 PTV Vissim。模拟交通数据用于研究在这些场景中出现不安全结果的可能性。
为了识别来自不相关车辆(例如,分车道高速公路中相反方向的车辆)的非关键 BSM,采用物理 (PHY) 层多普勒频移估计技术来准确确定传输车辆的相对速度关于接收器,以便能够筛选非关键 BSM。大多数 V2V 实现使用专用短程通信 (DSRC) 协议。将估计技术应用于 IEEE 802.11p 帧前导码,同时考虑到可能导致错误估计的硬件缺陷。为了评估和增强过滤器的性能,实施了一种简单的阻塞攻击,该攻击仅盲目地传输虚假 BSM 的爆发来利用瓶颈漏洞,以及一种试图绕过过滤器的基本版本的智能攻击。因此,加强了过滤器以有效抵御此类智能攻击。
0x02 BSM Verification Gridlock
关键 BSM: 首先审查 NHTSA 认为最重要的 BSM。在美国 49% 的碰撞事故中,这些 BSM 可能有助于防止前 10 名的碰撞前情景。这些 BSM 以及它们打算防止的冲突类型如下:
• 前方碰撞警告 (FCW) 和紧急电子制动灯 (EEBL):追尾碰撞;
• 十字路口移动辅助 (IMA) 和左转辅助 (LTA):T形碰撞;
• 不要通过警告 (DNPW):正面碰撞;
• 盲点/变道警告(BS/LCW):变道时侧滑碰撞。

如果在密集的道路上处理这些 BSM 失败,将无法实现 V2V 的主要目标,从而可能产生不安全的后果。使用百分比 𝑃0 来量化每种 BSM 类型的重要性,以表示给定类型的 BSM(如上所列)旨在防止的特定冲突数量与所有冲突数量的比率。根据 NHTSA 在 2017 年做出的估计计算了 𝑃0,假设每次碰撞都发生在车辆未能处理相应的警告 BSM 时。然后考虑四种情况,其中一个或多个 BSM 被丢弃在 (a) 一辆或 (b) 多辆车上。上表分别显示了每种 BSM 类型(基于 𝑃0)的重要性以及它们在城市和高速公路环境中的每种场景中预期防止的结果,突出显示了具有严重不安全结果的关键场景(用 * 标记)。
车辆密度的影响: 为了研究密集、笔直的道路对 BSM 处理瓶颈的影响,将 𝐵(𝜈, 𝜇, 𝑛,𝑙, 𝑑, 𝑟) 定义为该道路上任何车辆每秒接收的 BSM 平均数量,其中 𝜈是平均速度,𝜇 是平均车距(以秒为单位),𝑛 是每个方向的车道数,𝑙 = 1、2 分别表示单向和双向交通,𝑟 是单个车辆的 BSM 生成率(通常为 10 每第二),而𝑑是车辆的通信范围。在这里,车辆密度是乘积𝜇𝜈的倒数。请注意,给定车辆在直路上的矩形通信范围的面积为 2𝑛𝑙𝑑。可以通过几何和量纲分析验证 𝐵 随 𝑛、𝑙、𝑟 和 𝑑 线性增加,随 𝜈 和 𝜇 线性增加,如下所示:
例如,考虑前面提到的 I-490 高速公路和基于 DSRC 的 V2V,其中平均车速约为 50 mph(≈ 22.5𝑚𝑠^(−1) ),车辆间距为典型的 1.5 𝑠 ,并且 𝑑 = 1000𝑚 在双向交通的三车道高速公路上。在此环境中生成的 BSM 数量约为每秒 3600 个,导致这些 BSM 中约有 1100 个(约 30%)被丢弃在具有最大 2500 BSM 处理速率的芯片组(例如,Qualcomm 9150)。在密集的高速公路上,BSM 成为警告消息的可能性通常很高。因此,这种情况很可能导致有害结果。
0x03 Threat Model
考虑两种试图利用瓶颈漏洞的攻击类型,一种是简单攻击,一种是智能攻击。它们的攻击方法不同,但都有一个共同的目标——破坏自然交通流并影响尽可能多的车辆,可能造成碰撞。攻击者生成并传输伪造的 BSM,而它不需要生成有效的签名,因为它的目的只是通过强制进行过多的签名验证来限制接收方的处理器,并且不关心验证是否失败。由于攻击者试图破坏流量,成为流量的一部分是违反直觉的。因此假设攻击者是静止的,而不是沿着目标车辆移动的移动攻击者。他们可以使用公开可用的交通信息,例如年平均每日交通 (AADT) 数据来任意选择攻击位置,以选择可以造成最大破坏的最佳位置。进一步假设攻击者通过利用目标车辆发送的 BSM(指示它们的瞬时速度)或推断其目标道路的速度限制来了解平均速度。
在简单攻击中,攻击者试图通过在每个 BSM 间隔(即 100 毫秒)内传输 BSM 突发来进一步抑制车辆的瓶颈。它使用默认的 802.11p 参数来传输这些 BSM,而无需对 PHY 层帧进行任何修改。突发大小小于环境中 BSM 总数的 10%,从而使其不被检测到。通过在 Cohda Wireless MK6C 套件上的商用 V2V 芯片组(Qualcomm 9150)上进行的实验证实,攻击者可以在一个时间间隔内发送多达 40 个 BSM。
在智能攻击中,攻击者进一步尝试通过调整其生成的 BSM 的 PHY 层参数(例如,载波频率偏移)来规避简单的缓解技术。它的意图是不被检测为交通流的非参与成员。
0x04 Gridlock Attack Scenarios
在本节中描述了前文确定的特定关键场景,攻击者可以在这些场景中发起破坏性 BSM 阻塞攻击。将特定 BSM 警告在接收车辆处丢弃的概率表示为:

其中 𝑁 是该车辆在给定间隔内收到的所有 BSM 的总数,而 𝑚 是在同一间隔内发送特定关键 BSM 的车辆数量。通过认识到丢弃由 𝑚 不同车辆发送的特定 BSM 警告的事件是相同且独立的分布来推导出这种关系。以下场景是来自选定位置的特定实例。类似的场景可能存在于其他位置,但对这些位置的详尽研究超出了本文的范围。分析这些场景背后的主要目标是展示 𝑃 (𝑁 ,𝑚) 在不同场景中如何变化,即使没有攻击者,接收者也会丢弃至少 10% 的 BSM (𝑃 (𝑁 ,𝑚) > 0.1) .使用从 PTV Vissim 交通模拟器获得的交通数据在 MATLAB 中进行了模拟。
A.场景 1 - FCW
考虑一段公路MD-295,称为 Baltimore-Washington Pkwy。它以高交通密度和 1.5 秒的低车辆间距而臭名昭著。根据从马里兰州 DoT 获得的 AADT 数据计算车辆间距。此场景的模拟交通快照如下图所示,其中道路上的每个小彩色框代表一辆车。将 (2) 应用于从每次模拟运行中收集的车辆密度数据,观察到在具有 20-25 辆车的交通列中,FCW 在第一个间隔内以平均概率 𝑃 (𝑁 , 2 ) = 0.1186。在这里,𝑁 在每次运行中随着车辆密度而变化,但 𝑚 = 2 保持不变,因为在这里假设 2 车道交通,这意味着只有两辆领先的车辆能够在检测到前方碰撞时立即发送 FCW。通过递归应用上式,其中随着越来越多的车辆接收到 FCW,每个间隔中的 𝑚 增加,结果证明 FCW 平均需要 4-5 个间隔才能到达列中的所有车辆。使用当前的硬件,攻击者可以在每个时间间隔传输 40 个 BSM 的突发以加剧阻塞,同时保持未被发现。这将使丢弃 BSM 的可能性增加近 40%,并将 BSM 处理延迟增加 1-2 个间隔。在这种情况下,在车辆拥挤的情况下,这种延迟可能会导致碰撞。

B.场景 2 - LCW
对纽约州罗彻斯特郊外的 I-490 高速公路上的一段路进行了相同的分析。根据从纽约交通部收集的 AADT 数据,确定平均车辆间距为 1.5 秒。此场景侧重于在变换车道时发送 LCW 的车辆。由于 LCW 只会由尝试换道的车辆发出,在第一个区间设置 𝑚 = 1。事实证明,车辆丢弃 LCW 的平均概率为 𝑃 (𝑁 , 1) = 0.3443,并且在攻击者每间隔发送 40 个 BSM 的情况下增加了 18%。
C.场景 3 - IMA
现在看一个城市交叉路口场景,其中车辆依赖 IMA 消息来避免碰撞。考虑了 MD-97(乔治亚大道)和 MD-193 之间的交叉点,一辆车试图穿过十字路口的情况。有 1 辆车发送 IMA 警告,即 𝑚 = 1。交通模拟显示,在距离十字路口 1 公里半径内有 300 多辆车。确定接近交叉路口的车辆会以平均概率 𝑃 (𝑁 , 1) = 0.1910 丢弃 IMA,当攻击者在一个时间间隔内仅发送 30 个 BSM 时,该概率会增加 37%。
0x05 Proposed BSM Filtering Technology
在上层进行任何签名验证之前,在 PHY 层提出了一种过滤机制,基于 BSM 发送方的相对速度来确定该 BSM 的重要性。这种方法的好处是它产生的开销可以忽略不计,同时它减少了签名验证开销,允许接收器只验证通过过滤器的 BSM。
A.多普勒频移估计
相对速度可以通过测量由 PHY 层的多普勒频移引起的载波频率偏移 (CFO) 来估计。然而,CFO 不仅是由于发射和接收车辆的相对运动引起的多普勒频移 (𝑓𝐷 ) 的结果,也是由于振荡器缺陷引起的两个无线电振荡器工作频率差异的结果。为了准确估计相对速度,需要将 𝑓𝐷 与总 CFO 分开。
首先使用一种可靠的方法来估计整体 CFO Δ𝑓,使用帧前导码, 802.11p 中的前导码是一个周期信号。两个周期,每个 𝐿 样本长,采样周期为 𝑡𝑆 ,可用于创建序列 r。令 𝑟𝑖 是序列的第 𝑖 样本,其中 𝑖 = 1, . . . , 2𝐿.由于序列由相同的循环组成,所以𝑟𝑖 = 𝑟𝐿+𝑖 。请注意,应用 Δ𝑓 的最终 CFO,𝑟𝐿+𝑖 的相位被 Δ𝜙 (𝑡𝑆 ) = 2𝜋Δ𝑓 𝐿𝑡𝑆 抵消。因此,为了估计相位偏移 fΔ𝜙,接收器首先将 𝑟𝑖 的共轭乘以 𝑟𝐿+𝑖 以获得 𝑠𝑖 ,𝑖 = 1, . . . , 2𝐿:
 image-20210616221131274
image-20210616221131274
然后它通过添加所有 𝑠𝑖 来计算噪声(未显示)以获得:
 image-20210616221142912
image-20210616221142912
其中 ∠(𝑥) 表示复数 𝑥 的相位。因此,估计的 CFO 由下式给出:
 image-20210616221148527
image-20210616221148527
总体 CFO 也是 Δ𝑓 = 𝑓𝐷 + 𝑓𝑆 的总和,其中 𝑓𝑆 是与振荡器缺陷相关的采样时钟漂移。然而,只对 𝑓𝐷 感兴趣,估计移动场景中的采样时钟漂移𝑓𝑆。因此,由于移动性引起的估计多普勒频移由下式给出, f𝑓𝐷 = Δf𝑓 − 𝑓e𝑆 。最后,估计发射器和接收器之间的相对速度为:
 image-20210616221205823
image-20210616221205823
其中𝑐是光速,𝑓0是载波频率(5.9GHz),𝑣𝑟𝑒𝑙是相对速度。当发射器远离接收器时为负,当发射器移向接收器时为正。
B.基本过滤器
在确定相对速度后,接收车辆根据一组过滤规则对 BSM 进行过滤,该规则将发送车辆分为三类:(1)相反方向的车辆,(2)同方向远离接收方的车辆,和 (3) 车辆以相同的方向朝着接收器移动。过滤器仅在接收器移动且道路密集时才有效。接收器观察它每秒接收的 BSM 的平均数量,以决定是否激活过滤器。在拥堵情况下,接收器只关注同向行驶且距离接收器越来越近的车辆发送的 BSM,例如通过停止前方车辆发送的 FCW。因此,可以安全地过滤 1 类和 2 类车辆的 BSM。
为了检查发射器是否处于相反的方向,将相对速度的“幅度”与阈值进行比较。向同一方向移动的发射器的最大相对速度幅度等于 𝑚𝑎𝑥 (𝑢𝑅, 𝑢𝑆𝐿),其中 𝑢𝑅 是接收器的速度,𝑢𝑆𝐿 是速度限制。因此,较高幅度的相对速度表明车辆正在向相反方向移动(类型 1)。也知道相对速度 𝑣𝑟𝑒𝑙 的符号表示发射器是向着接收器移动还是远离接收器移动。让 𝑘 指定过滤的积极程度。因此,有源过滤器将传输车辆分类如下:
• 类型 1:如果 |𝑣𝑟𝑒𝑙 | ≥ 𝑘 · 𝑚𝑎𝑥 (𝑢𝑅, 𝑢𝑆𝐿),则发射器向相反方向移动。
• 类型 2:如果 |𝑣𝑟𝑒𝑙 | < 𝑘 · 𝑢𝑅 和 𝑣𝑟𝑒𝑙 < 0,则发射器将远离接收器。
• 类型 3:如果 |𝑣𝑟𝑒𝑙 | < 𝑘 · 𝑢𝑅 和 𝑣𝑟𝑒𝑙 ≥ 0,则发射器向接收器靠拢。
C.针对基本过滤器的智能攻击
因为假设简单攻击者是静止的,|𝑣𝑟𝑒𝑙 | = 𝑢𝑅,这样的攻击者发送的 BSM 很容易在接收者处被过滤掉。但是,如果攻击者很聪明并且能够应用人工 CFO 使其能够“模拟”移动的车辆,则其传输的 BSM 可以绕过上面的基本(朴素)过滤器。
考虑接收车辆以平均速度 𝑣𝑅 移动。认为攻击者 𝐴 停在它确定的最适合制造中断的位置附近。攻击者模拟以速度𝑣𝐺 移动的幽灵车辆。为此,它在应用等于对应于速度 𝑣𝐺 的多普勒频移的人工 CFO Δ𝑓𝐺 后传输 BSM。然后接收器会估计 𝑓𝐷 = Δ𝑓𝑅 -Δ𝑓𝐺 ,其中 Δ𝑓𝑅 是由于接收器运动引起的 CFO。因此, 𝑣𝑟𝑒𝑙 = 𝑣𝑅 − 𝑣𝐺 。攻击者从一个范围中选择 Δ𝑓𝐺 的值,使得 𝑣𝑟𝑒𝑙 在接收器处满足类型 3 车辆的定义并绕过过滤器。为了能够影响道路上的多辆车,攻击者可以将𝑣𝐺的幅度设置为速度限制,因为大多数接收车辆将以这个速度移动。使用基本过滤器,接收车辆无法区分真实运动和人工应用的 CFO。
应用人工 CFO: 考虑在采样周期 𝑡𝑆 生成的发送器处包含 BSM 帧前导的两个周期的 2𝐿 个样本的序列 S。由速度 𝑣𝐺 引起的多普勒频移由下式给出:
 image-20210616221358777
image-20210616221358777
序列每个样本的相位偏移由下式给出:
 image-20210616221403550
image-20210616221403550
其中向量 m = 1, . . . , 2𝐿.那么结果序列𝑆¯是:
 image-20210616221409328
image-20210616221409328
其中‘·’代表逐元素向量乘法。攻击者将人工 CFO 应用于旨在用于 CFO 估计的循环(或整个前导码)以生成其前导码。可以说,由于移动性,应用 CFO 对传输信号的影响与多普勒效应并不完全相同。分析了两者的影响,并确定由于多普勒效应产生的真实 CFO 和人工 CFO 彼此相差在 1 Hz 以内。这种差异可以忽略不计,因为 CFO 往往处于 100 Hz 的数量级。
D.改进的过滤器
为了使过滤器对智能攻击敏感,利用了攻击者的某些限制。正如威胁模型中所解释的,这样的攻击者需要是静止的,并且只能依赖目标道路的速度限制。目标车辆可以在短时间内扰乱其速度,以试图造成发射器相对速度 Δ𝑣𝑟𝑒𝑙 相对于时间 Δ𝑡 的变化。攻击者无法可靠地及时获取 Δ𝑣𝑟𝑒𝑙 和 Δ𝑡 来改变其人工 CFO 以试图绕过过滤器。对于从在时间窗口 Δ𝑡 上发送的 BSM 中获取的 Δ𝑣𝑟𝑒𝑙 的给定估计。
如果 Δ𝑣𝑟𝑒𝑙/Δ𝑡 > 𝑡ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑,则 BSM 很可能是由攻击者发送的。挑战在于选择值 𝑡ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑,使其最小化误报和漏报,即由于速度的微小变化,它不会过滤来自合法车辆的数据包。PTV Vissim 模拟表明,交通列倾向于彼此一致地改变它们的速度。看到车辆在五秒内将速度从 45 mph 增加到 55 mph,并且不同车辆之间的相对速度变化很小。这允许设置一个足够小的 𝑡ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑 来最小化误报和漏报。
0x06 Evalution
使用两个 USRP N210 和 UBX40 子板进行实验,这些子板在实验室环境中是固定的。在 LabVIEW 中为 DSRC 和 CFO 估计技术实现了 802.11p 前导码。Tx(攻击者)和 Rx(目标车辆)彼此相距 4 m,Tx 以 12 dBm 发射功率运行。对具有不同合成噪声功率的 AWGN 信道进行建模,以实现 5 到 20 dB 的 SNR。为了模拟移动性,利用在模拟相对速度影响的传输帧上应用人工 CFO。发射器在 500 秒内以 10 Hz 的速率发送帧。这些包含不同类型的良性和恶意数据包,每个数据包都有不同的人工 CFO。
对于简单攻击,由于多普勒频移导致的 CFO 幅度较大且为负,因为攻击者并未主动尝试绕过过滤器。对于智能攻击,该 CFO 的规模较小且积极,因为攻击者正在智能地尝试通过模拟以与目标相同的速度向同一方向移动的车辆来智能地绕过过滤器。为相反方向行驶的车辆应用了较大的 CFO,而在同一方向行驶的车辆的 CFO 量级非常小。利用从 PTV Vissim 获得的模拟交通数据以每 100 毫秒的时间间隔生成瞬时速度信息,并使用它来将特定的 CFO 应用于特定的良性帧。
 image-20210616221552462
image-20210616221552462
上图(a) 显示了定义的基本过滤器的性能,但没有进行改进。可以看到,在简单的攻击下,对于 𝑘 = 1.1 和大于 10 dB 的 SNR,过滤器能够实现大于 80% 的精度。然而,在智能攻击下(图(b)),基本过滤器完全无效,总体准确率接近 50%。这表明智能攻击足以有效绕过基本过滤器。
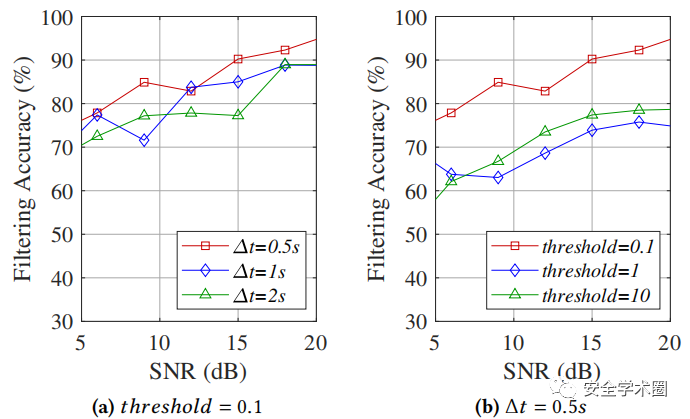 image-20210616221557121
image-20210616221557121
接下来研究调整过滤器以抵御智能攻击后的性能改进。准确度似乎与 Δ𝑡 无关,如上图(a) 所示,因此可以将其设置为 0.5s 的最低可能值以获得最快的性能。可以在图(b) 中看到,当 Δ𝑡 = 0.5 时,增加 𝑡ℎ𝑟𝑒𝑠ℎ𝑜𝑙𝑑 的值对精度有负面影响,因为在良性车辆中相对速度的变化率很小。总体而言,过滤器在 SNR > 6 dB 时实现了超过 80% 的准确度,这意味着通过过滤非关键 BSM,接收器现在每个间隔可以处理 450 个以上的 BSM。使用改进的过滤器,基本上消除了场景中的瓶颈,将 BSM 被丢弃的概率降低到几乎为零。
0x07 Conclusion
在本文中分析了城市和高速公路环境中的交通场景,这些场景显示了 V2V 中 BSM 数字签名验证瓶颈的严重性。本研究提出了一种 BSM 过滤机制,它根据发射器的相对速度丢弃非关键 BSM,使用两辆车之间的多普勒频移估计。已经表明,改进的过滤机制对于简单攻击和智能攻击都是稳健的。在实际流量模拟和 USRP 实验的帮助下,已经证明过滤器在 SNR > 6 dB 时以 80% 的准确度缓解了瓶颈,允许每个间隔处理 450 个以上的 BSM。将来,打算通过利用不同的统计性能指标来进一步改进过滤器。
声明:本文来自安全学术圈,版权归作者所有。文章内容仅代表作者独立观点,不代表安全内参立场,转载目的在于传递更多信息。如有侵权,请联系 anquanneican@163.com。
