0 引 言
无人机(Unmanned Aerial Vehicle,UAV)以其自身成本低、易部署、易操作、无人员伤亡风险、机动性能好等优点,在军事领域有着广泛的应用和悠久的历史。但是,无人机支持战场通信服务保障的相关研究,目前尚处于初始阶段。无人机可以大大扩展战场环境中的通信范围,克服不利地形的约束,提高通信服务质量,已被广泛应用于现有的通信支持单位。但是,单个大型无人机的能力是有限的,而小型多无人机系统(Multi-UAV System)网络可以覆盖整个战场,满足战斗人员实时信息共享的需要。小型多无人机协同应用,比单个大型无人机系统具备可生存性更强、可扩展性更高、完成任务更快、雷达截面小更难被发现等优势,同时也面临着许多实际问题和独特的挑战。其中,最重要的一个设计问题是多无人机间的协同通信。如何设计并实现适用于未来发展需要、稳定可靠的多无人机通信网络,成为迫切需要解决的问题。
本文介绍无人机自组网的概念及其特点,总结概括近年来无人机自组网相关领域的研究进展,主要包括物理层的无线电传播模型和天线结构、数据链路层的MAC协议以及网络层的路由协议等。
1 无人机自组网简介
近年来,无人机战场应用越来越受到重视。无人机战术互联网络,将成为今后战场通信重要的发展方向。无人机自组网(UAV Ad-Hoc Network,UANET)在这种需求下应运而生,是以传统移动自组网(Mobile Ad-Hoc Network,MANET)和车载自组网(Vehicle Ad-Hoc Network,VANET)为基础发展而来的。UANET可以快速部署并提供安全可靠、抗干扰、抗毁性强的通信网络,可有效减少单个无人机的负载和开销,同时可以辅助其他现有战场通信方式,大幅提升无人机作战平台作战半径和作战效率。
1.1 UANET基本概念
为了减少多无人机间协同通信对地面站或卫星等基础通信设施的依赖,UANET将每个无人机作为网络中的节点。各节点间能够相互收发数据,自动连接搭建起一个无线移动多跳网络。该网络中每个节点都集成了发射器、接收器和路由器功能,以多跳通信的方式把数据传递给远处节点。
1.2 UANET主要特点
UANET可以看作MANET和VENET的一类特殊演变形式,不但具备MANET固有的一些特点,还具备自身的特殊性。
1.2.1 高速移动的节点和动态变化的网络拓扑
这是UANET和传统MANET最明显的区别。飞行中的旋翼无人机速度可以达到30~460 km/h[1]。节点的高速移动会引起网络拓扑的频繁更新,从而严重影响网络通信和协议性能。此外,无人机平台的通信丢失和视距链路的不稳定性,也是导致链路中断和拓扑频繁更新的原因。
1.2.2 稀疏的节点和异构的网络
无人机节点在战场环境的空域中稀疏分布,节点间大多都相距较远。在一定空域内,无人机节点可能分布较少,导致无人机节点密度降低。因此,网络连通性至关重要。在无人机实际应用中,网络结构可能会包括不同类型的无人机、飞行器或采用分级式架构。这些场景中,节点间彼此都存在一定的差异性,导致整个无人机网络可能是异构互联的。
1.2.3 无线电传播模型的特殊性
UANET和其他移动自组网运行环境之间的差异会影响无线电传播特性。MANET和VANET节点非常接近地面,许多情况下,发送者和接收者之间不存在视距链路。所以,无线电信号受地形地理结构的影响较多。然而,UANET节点可能都远离地面。在大多数情况下,无人机之间存在视距链路,受地形地理结构的影响较少。
1.2.4 移动模型特殊性
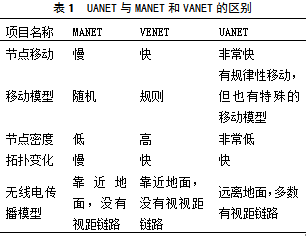
通常,MANET节点在特定地形上移动,VANET节点在高速公路上移动,而UANET节点在空中飞行。MANET通常选择随机路点移动模型,其节点随机选择移动方向和移动速度。VANET节点限制在高速公路或道路上移动。因此,VANET移动模型中的节点具有明确的可预测性。UANET中的节点通常具有自身独特的运动规律,移动模型会对UANET的通信服务、移动性管理和整体性能等产生重要影响。在某些选择全局路径规划的多无人机协同应用中,无人机的移动轨迹具有一定的可预测性。文献[2]针对执行侦察巡视任务的无人机开发了两种无人机移动模型。一种是实体随机移动模型,即依据事先指定的马尔可夫随机过程进行方向控制的概率独立性随机运动;另一种是分布式集群信息素排斥模型(Distributed Pheromone Repel mobility model,DPR),即根据无人机在执行任务过程中产生的信息素数量多少来指引无人机移动,具有准确、可靠的搜寻特性。文献[3]针对在某一空域内做盘旋运动的无人机,提出了一种半随机圆周移动(semi-random circular movement,SRCM)模型,依据一个二维圆形区域,推导出节点移动概率的近似分布函数。文献[4]根据无人机在飞行轨迹中需要克服急停和急转现象、保持平滑航迹的应用需求,提出了一种增强型高斯马尔可夫移动模型(enhanced Gauss-Markov mobility model,EGM),通过修正GM模型中的方向偏离,可有效实现边界避免机制,并获取更贴近实际的无人机飞行航迹。文献[5]提出了两种基于圆形轨迹的机载网络移动模型,它们允许改变飞行高度。第一个模型捕获所有三维之间的运动相关性,第二个模型z维运动(高度)独立于其他两个维度。文献[6]提出了PPRZM模型(Paparazzi Mobility Model),给出了五种运行状态,分别是停留(Stay-At)、方向点(Way-point)、八字(Eight)、扫描(Scan)和椭圆(Oval),即通过调整不同状态的运行概率来执行更多不同的任务。表1为UANET与MANET和VANET的区别总结。
2 UANET组网关键技术的研究进展
UANET基于无线信道且存在快速变化的无线网络。无人机节点的快速移动会引起网络的波动和拓扑的频繁更新,从而导致UANET无法直接采用传统的组网协议。因此,针对UANET网络设计的协议和算法需要全面考虑各方面因素,在牺牲最小性能的前提下确保网络正常运行。
2.1 物理层
物理层处理基本的信号传输技术,如调制解调或信号编码。各种数据比特序列可以通过改变信号的频率、幅度和相位,用不同的波形表示。总体而言,在物理层中,数据比特被调制为正弦波形,并利用天线发送到空中。为了开发适用于UANET的稳定、可持续的数据通信体系结构,物理层必须提供可靠支持。其中,研究无线电传播模型和天线结构是影响UANET物理层设计的关键因素。
2.1.1 无线电传播模型
电磁波从发射机发出后,通过无线信道到达接收机。无线电波传播的特征表示为一个数学函数,称为无线电传播模型。与其他类型的无线网络相比,UANET环境在无线电传播方面有几个独特的挑战:通信距离的变化;天线辐射图中通信对的方向;地面反射效应;无人机平台和机载电子设备产生的阴影;机身姿态(俯仰、滚转、偏航等)对无线链路质量的影响;环境条件;干扰和敌对干扰。
由于上述因素,通信链路在UANET中随着时间推移表现出不同的质量。文献[7]研究了无人机之间、无人机到地面和地面到无人机通信链路的特征。这项研究中,对每种链路类型、自由空间和两个地面的近似模型进行比较。当无人机接近地面时,观察到灰色区域的存在。灰色区域表明,无人机到无人机链路的无线电传播模型类似于双射线地面模型,且UANET协议的设计必须意识到由于衰落造成的灰色区域的存在。文献[8]研究了无人机之间通信的信道建模问题。研究中观察到无人机之间的无线信道的误差统计是非平稳的。根据无人机之间距离的变化,提出了一个双态马尔科夫模型,以结合研究适用于强视线路径的Rician衰落的影响。实验结果表明,该无线电模型能够模拟非平稳误差统计下的分组丢包。文献[9]提出基于Nakagami-m的无线电传播模型用于UANET通信。该模型估计了覆盖衰落效应的多径环境的接收信号强度,并将其表示为两个参数的函数——平均接收无线电强度和衰落强度。此外,针对合作无人机网络,推导出Nakagami-m衰落信道上的中断概率的数学表达式。文献[10]中,基于多载波中继的无人机网络的性能分析,在衰落信道上进行分析建模,给出了无人机之间和无人机对地面站链路中断概率的一般分析公式。文章指出,衰落信道模型应根据运行环境来选择。例如,瑞利衰落可能更适合于低空拥挤区域应用,而有高衰落参数的Nakagami-m和威布尔衰落最适合高空开放空间任务。
2.1.2 天线结构
天线结构是高效UANET通信体系结构的最重要因素之一。无人机之间的距离相对更远,且直接影响UANET天线结构。虽然可以使用更高功率的无线电来克服这个问题,但是在更远距离上仍然会出现高链路损耗和变化。为了克服这种现象,可以部署多个接收器节点,以利用无线信道的空间和时间分集来提高分组传送速率。结果表明,无人机接收器节点在短时间尺度上表现出较差的分组接收相关性,最终需要使用多个发射器和接收器提高分组传送速率。天线类型是影响UANET性能的另一个因素。文献中为UANET应用部署了两种类型的天线——定向和全向天线。全向天线在全方位辐射接收功率,而定向天线可以通过期望的方向收发数据。
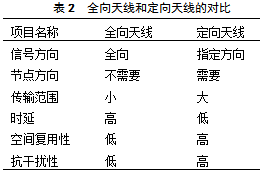
全向天线的优点是可以全方位辐射功率,不需要知道节点位置信息,但通信范围和空间复用之间有一个折衷。定向天线的优点是传输范围比全向天线的传输范围更大。对于UANET来说,这是一个重要的优势。较长的传输范围减少跳数,且可以降低网络时延。尤其是在实时UANET应用中,时延是最主要的设计因素之一。基于定向天线的系统,可以同时处理UANET的通信范围和空间复用的问题。它可以增加通信范围,但不会限制空间复用。定向天线的另一个优点是,相对于全向天线具有更高的安全性,抗干扰能力更强。表2为全向天线和定向天线的对比。
2.2 MAC协议
MAC协议的质量直接影响有限带宽的资源效率,并对UANET的通信性能产生重要影响。目前,UANET的MAC协议面临如下问题:
(1)由于节点高移动性导致的链路质量变化频繁和节点之间的距离较远造成信道中断;
(2)多跳共享广播信道会带来严重的报文冲突问题;
(3)由于节点发射机功率、节点所处地理位置的差异、周围环境的差异等因素影响,可能造成单通信道,严重影响MAC协议的性能;
(4)由于无线信道本身的物理特性,以及报文冲突、信号衰减、信道噪声等因素,信道实际可用带宽非常有限,会远小于理论设计的最大带宽。
MAC协议的设计要求:要有更高的空间复用能力,以实现最大化网络节点的同时通信需求;由于报文冲突将严重影响无线信道的利用效率,因此需要提供冲突避免和解决方案;应该降低对硬件设备的依赖,即不能对无线收发机做太多假设,从而让任何满足基本功能假设的设备都能采用该MAC协议。
2.2.1 基于定向天线的MAC协议
定向天线大大增加了通信距离,抗干扰能力增强,有较大的前向增益。定向天线还带来了独特的设计问题,特别是对于MAC层。虽然现有的大多数定向天线MAC层都是针对MANET和VANET提出的,但也有少数关于定向天线的UANET的MAC层设计的研究。文献[11]中,Alshbatat和Dong提出了无人机自适应MAC协议方案(AMUAV)。AMUAV通过其全向天线发送其控制包(RTS、CTS和ACK),而DATA包则由定向天线发送,证明了基于定向天线的AMUAV协议可以提高多无人机系统的吞吐量、端到端时延和误码率。
2.2.2 具有全双工无线电和多分组接收的MAC协议
在传统无线通信中,接收和发送不能同时进行。随着无线电电路的最新进展,现在可以在同一个信道上实现全双工无线通信。另一个关于传统无线通信的限制是数据包接收。如果有多个发件人,则接收机无法正确接收发送来的数据。然而,在多分组接收(Multi-Packet Reception,MPR)无线电电路的帮助下,使得来自多个信号源的数据接收成为可能。全双工和MPR无线电电路对UANET的MAC层有重大影响。信道状态信息(Channel State Information,CSI)是全双工无线电最重要的参数之一。在高度动态的环境中,几乎不可能确定完美的CSI。文献[12]中,提出了一种新的基于标记的UANET MAC层协议,具有全双工和多分组接收(MPR)无线电,目的在频繁更新CSI,以便无人机可以随时获得最新的CSI信息。CSI更新的基于令牌的结构,消除了数据包冲突。性能结果显示,提出的MAC协议性能较为突出。
2.3 路由协议
路由协议是网络层的主要功能。UANET中节点之间的通信服务通过多跳数据转发机制实现,这将需要路由协议决定如何进行有效的数据转发。但是,由于UANET特有的问题,如链路质量的快速变化和节点的高速移动性等,大多数MANET路由算法对于UANET并不理想。
2.3.1 基于拓扑的路由协议
基于拓扑的路由可分为主动式和被动式,其根据网络的链路信息传输数据。它的运行原理是通过跳数(Hop)寻找最短可用路径,但在较大型网络和高度动态网络中无法保证数据包的传输速率。为了满足高动态UANET的通信需求,提出了许多可行的路由协议。
(1)主动式路由
主动式路由协议使用表来存储连接节点的相关信息。A.I. Alshabtat[13]提出了一种基于定向天线的优化路由协议,称为定向优化链路状态路由(Directional Optimized Link State Routing,DOLSR)。它通过使用多点中继节点(Multipoint Relay,MPR),减少传输开销,降低网络时延。FS-OLSR[14]提出了一种跨层快速相邻感知协议。基于链路感知和邻居检测的Hello消息,与链路层反馈信息一起,用于快速更新网络层邻居列表,从而有效提升感知邻居节点的能力。此外,计算MPR所需要的参数之一是邻居节点的新鲜度。该协议提高了拓扑控制(Topology Control,TC)消息中广播邻居节点的新鲜度,使其更适用于节点快速移动的场景。
文献[15]提出了使用GPS信息的预测OLSR,根据节点之间的相对速度,测量预期传输计数(ETX),然后通过它进行辅助路由决策。该协议有效解决了UANET频繁切换路由引起的数据包丢失问题。文献[16]提出了一种基于节点移动性和负载感知的OLSR协议,称为ML-OLSR协议。该算法将节点移动性和负载感知算法引入OLSR协议,实现了更好的传输性能和更低的网络时延。
Linhua Ma[17]提出了一种用于高速移动航空网络的链路感知OLSR(OLSR-LA)路由协议。该协议通过使用收到的2个连续的Hello数据包中烦人多普勒频率和其他信号特征,推算2个相邻节点的相对移动速度和移动趋势,以及2个节点间的链路保持时间。通过链路感知,使用负载均衡算法来避免拥塞。实验结果表明,该优化算法能有效提高数据传输速率,降低数据包端到端时延,提高网络可用带宽。此外,文献[18]提出NCR-OLSR路由协议,通过引入邻居变化率(Neighbors Change Rate,NCR)的概念,充分利用局部网络拓扑结构的稳定性,优化MPR选择算法,提升传输稳定性和成功率。
(2)反应式路由
反应式路由协议旨在克服维护路由表引起的路由开销问题。AODV(Ad-Hoc按需距离矢量路由)是一种Ad-Hoc网络中广泛使用的典型无源路由协议。AODV在传输数据时,在整个网络路径上广播以查找消息。当节点收到路由并查找消息时,它会检查本地节点是否是目标节点。若是目标节点,则节点响应路由请求;否则,将源节点地址加入到本节点的路由表中并转发该消息。文献[19]为UANET提出了AODV的时隙版本。当AODV以随机接入模式发送其控制分组时,按时间点播的协议使用专用时隙,网络中只有一个节点可以发送数据分组。仿真结果指出,它可以有效减少数据包冲突,并提高数据包传输率。
文献[20]提出了IMAODV(改进的AODV)路由协议。该协议改进了Hello消息机制和路由修复机制,同时改进MAC层,允许节点具有监听功能,旨在高速运动条件下建立稳定可靠的路由,减少数据包端到端传输时延,提高网络可用带宽。文献[21]同样基于AODV协议,在路由查找过程中使用最小跳数的原则,使用路由更新、路径长度和路径可靠性来进一步优化路由。
文献[22]提出了AODV-NM路由协议,协议基于节点移动性和可用邻居数量,并通过设定门限值来确定链路质量,可以选择准确可靠的路由。文献[23]介绍了一种新的基于辅助维护的改进AODV路由协议,称为CSE-AODV路由协议。在CSE-AODV协议中,为了提升局部修复的速度和修复率,优化了AODV协议的动态TTL估计算法,并设计了辅助节点的维护机制。同时,为了提高路径的稳定性和优化路径选择机制,增加了基于快速局部路由算法的链路稳定性度量机制和稳定性阈值触发机制。
动态源路由(DSR)是一种简单而有效的反应式路由算法,文献[24]中开发了带有动态源路由(DSR)[25]协议的UANET测试平台,并针对UANET提出了一种优化的UAV-DSR算法,可以根据不同的阻塞状态和能量等级,建立相应的RREQ响应策略。文献[26]提出REDSR协议,对于强信号UANET限制了最大跳数的路由请求,可以节省本地节点的存储空间,减少路由开销。文献[27]提出UEDSR协议来研究小型无人机的任务,引入了能量均衡机制,可以有效减少热点过多的能量消耗,并延长网络寿命。
2.3.2 基于位置的路由协议
基于地理位置的路由协议是为移动Ad-Hoc网络提出的一种新颖的路由设计策略。它根据最短距离或最近的方向确定下一跳节点。基于地理位置的路由协议可以实现无状态、分布式的数据转发,因为它不需要考虑全局链路状态。因此,它更适用于拓扑结构频繁变化的网络结构。文献[28]表明,当与基于拓扑的路由比较时,贪婪周边无状态路由(GPSR)协议性能更优越。文献[29]开发了一种基于位置的路由协议仿真实验框架,验证了GPSR协议适用于节点密度较大的UANET,但在节点密度较小的网络中表现较差。
文献[30]介绍了地理位置移动导向路由(GPMOR),使用高斯—马尔可夫移动模型来预测节点移动,并选择下一跳节点。文献[31]中的UANET传统贪婪转发策略,当发生路由漏洞时采用分组恢复策略。文献[32]提出了用于UANET的多媒体数据传输的改进GPSR协议。在选择最佳下一跳时,需要考虑节点位置、相对移动速度和移动方向等因素。此外,依据网络中的节点发送的反馈信息,实现全局路径最优化。
文献[33]提出负载平衡地理路由(LBGR)协议,适用于三维高动态Ad Hoc网络。该协议将以“到达目标节点通信范围以内的时间”作为主要路由决策依据,代替GPSR使用的“最接近目标节点”决策原则,以提高高动态网络环境下的有效性环境路线选择和可靠性。同时,节点之间流量合理分配,实现了负载均衡,有效减少了拥塞问题。GRAA(航空器Ad-Hoc网络的地理路由协议)[34]根据节点的三维坐标位置信息和速度信息,在一段时间后选择到目标节点的最近节点作为下一跳路由选择的依据。
文献[35]提出基于节点移动预测的MPGR(基于移动性预测的地理路由)。该协议通过邻居节点和源节点之间的距离以及邻居节点和目的节点之间的距离,判断下一跳路由选择。在DGLAR(Dynamic Geographic Load Aware Routing,动态地理负载感知路由)[36]中,路由选择考虑了节点相对运动速度和数据拥塞,定义了一个新的度量标准,可以根据网络应用环境调整动态路由因子。但是,根据具体的理论,实际应用中很难获得有效的路由因子。
2.3.3 分级路由协议
为解决网络可扩展性问题,开发了另一组用于UANET的分级路由协议。网络由多个不同任务区域的集群组成。每个集群都有一个簇首(Cluster Head,CH),且集群中的所有节点都在CH的直接传输范围内。CH与上层无人机或卫星直接或间接连接形成分级网络。当任务区域很大时,该模型可以产生更好的性能结果。分级路由最重要的设计问题之一是集群的形成。
移动性预测分级协议是为UANET开发的分级形成算法[37]。UANET节点的高移动性结构导致频繁的集群更新,且移动性预测集群目的是通过预测网络拓扑更新来解决这个问题。它通过字典Trie结构预测算法[38]和链路到期时间移动性模型,预测无人机的移动结构。它需要这些模型的加权总和,且其邻居中具有最高权重的无人机被选为CH。仿真研究表明,这种CH选择方案可以增加群组和CH的稳定性。文献[39]中,提出了另一种用于无人机组网的分级算法。它首先在地面上构建集群,然后在多无人机系统运行期间更新它。地面分级规划计算分级方案,然后根据地理信息选择CH。部署无人机后,根据任务信息调整集群结构。仿真研究表明,它可以有效提高稳定性,保证动态组网的能力。表3为路由协议分类汇总。

3 结 语
近年来,UANET受到广泛关注,因为它具有更大的操作范围、更广阔的应用场景和完成更复杂的任务等优势。但是,UANET的设计与实现涉及到诸多方面的先进技术,面临着诸多不同的严峻挑战,而通信服务问题是UANET极具挑战性的设计问题之一。本文从移动性、节点密度、拓扑变化、无线电传播模型和移动模型等方面,讨论了UANET和其他Ad-Hoc网络类型之间的差异,以分层方式介绍了近年来有关UANET的相关研究。其中,物理层的特性直接影响其他层的设计和整体UANET性能。现有的与UANET物理层相关的研究,主要集中在无线电传播模型和天线结构上。MAC协议的质量直接影响有限带宽的资源效率,并对UANET的通信性能产生重要影响。现有的一些MAC层研究中使用定向天线技术或者全双工无线电技术有效降低报文冲突,提升了整体网络性能。路由协议的质量直接影响了通信服务中数据传递的效率和性能。现有的路由协议研究针对不同的应用场景和需求设计了不同的路由协议,各有优劣。实际应用中,应根据不同的需求,选取不同方式的路由协议。
参考文献:
[1] Do D.U S Army Roadmap for Unmanned Aircraft Systems 2010-2035[Z].2010.
[2] Kuiper E,Nadjm-Tehrani S.Mobility Models for UAV Group Reconnaissance Applications[C].Proceedings of International Conference on Wireless and Mobile Communications,2006.
[3] Wang W,Guan X,Wang B,et al.A Novel Mobility Model Based on Semi-random Circular Movement in Mobile Ad Hoc Networks[J].Information Science,2010,180(03):399-413.
[4] Biomo J D,Kunz T,St-Hilaire M.An Enhanced Gauss-Markov Mobility Model for Simulations of Unmanned Aerial Ad Hoc Networks[C].Proceedings of 7th Wireless and Mobile Networking Conference,2014.
[5] Xie J,Wan Y,Namuduri K,et al.A Comprehensive Modeling Framework for Airborne Mobility[C].The American Institute of Aeronautics and Astronautics (AIAA) Conference,2013.
[6] Ouns B,Alinoe A,Fabien G,et al.A Mobility Model For UAV Ad hoc Network[C].International Conference on Unmanned Aircraft Systems(ICUAS),2014.
[7] Ahmed N,Kanhere S,Jha S.Link Characterization for Aerial Wireless Sensor Networks[C].GLOBECOM Wi-UAV Workshop,2011:1274–1279.
[8] Zhou Y,Li J,Lamont L,et al.Modeling of Packet Dropout for UAV Wireless Communications[C].International Conference on Computing,Networking and Communications(ICNC) IEEE,2012:677-682.
[9] Abualhaol I Y,Matalgah M M.Outage Probability Analysis in a Cooperative UAVs Network over Nakagami-m Fading Channels[C].IEEE Conference on Vehicular Technology,2006:1-4.
[10]Abualhaol I Y,Matalgah M M.Performance Analysis of Cooperative Multi-carrier relay-based UAV Networks over Generalized Fading Channels[C].International Journal of Communication Systems,2011,24(08):1049-1064.
[11]Alshbatat A I,Dong L.Adaptive MAC Protocol for UAV Communication Networks Using Directional Antennas[C].Proceedings of International Conference on Networking,Sensing and Control(ICNSC),2010:598-603.
[12]Cai Y,Yu F,Li J,et al.MAC Performance Improvement in UAV Ad-hoc Networks with Full-duplex Radios and Multi-packet Reception Capability[C].Proc. of IEEE International Conference on Communications(ICC),2012:523-527.
[13]Alshabtat A I,Dong L,Li J,et al.Low Latency Routing Algorithm Forunmanned Aerial Vehicles Ad Hoc Networks[J].International Journal of Electrical and Computer Engineering,2010,6(01):48-54.
[14]Yang L,Hang L,Dawei G,et al.A Cross-Layer Fast Neighbor Sensing Based OLSR Protocol[J].Chinese Journal of Sensors and Actuators,2012,25(01):99-103.
[15]Rosati S,Kruzelecki K,Traynard L,et al.Speed-aware Routing for UAV Ad Hoc Networks[C].Proceedings of GLOBECOM,2013.
[16]Zheng Y,Wang Y,Li Z,et al.A Mobility and Load Aware OLSR Routing Protocol for UAV Mobile Ad Hoc Networks[C].Proceedings of 15th IEEE Information and Communication Technologies Conference,2014.
[17] Ma L H.Link Awareness-based OLSR Routing Algorithm for Airborne Highly Dynamic Networks[J].Journal of Beijing University of Aeronautics and Astronautics,2016,42(07):1326-1334.
[18]Shujie W.Research on Aircraft Ad Hoc Network Routing Protocols[D].Chengdu:University of Electronic Science and Technology of China,2016.
[19]Forsmann J H,Hiromoto R E,Svoboda J.A Time-slotted on-demand Routing Protocol for Mobile Ad Hoc Unmanned Vehicle Systems[J].Proceedings of SPIE-The International Society for Optical Engineering,2007:6561.
[20]Gongyan Y,Yujun K,Keping L.A Routing Protocol for High Speed Mobile Ad-hoc Networks[J].Application of Electronic Technique,2010(05):120-124.
[21]Biomo J D,Kunz T,St-Hilaire M.Routing in Unmanned Aerial Ad Hoc Networks:Introducing a Route Reliability Criterion[C].Proceedings of 7th IEEE Wireless and Mobile Networking Conference,2014.
[22]Wang D,Zhao Y,Ma J.Optimization of AODV Routing Protocol for UAV Network[J].Computer Measurement & Control,2013,21(06):1580-1583.
[23]Tian S.Research on AODV Routing Protocol Based on Maintenance of Assistance Nodes[D].Harbin:Harbin Institute of Technology,2016.
[24]Brown T,Doshi S,Jadhav S,et al.A Full Scale Wireless Ad Hoc Network Test Bed[C].Proc. International Symposium on Advanced Radio Technologies,2005:50-60.
[25]Johnson D B,Maltz D A.Dynamic Source Routing in Ad Hoc Wireless Networks[C].Mobile Computing,The Kluwer International Series in Engineering and Computer Science,1996:153-181.
[26]Li J,Zhang X L.A Novel DSR-based Protocol for Signal Intensive UAV Network[J].Applied Mechanics and Materials,2013,241-244(12):2284-2289.
[27]Li J,Liu X C.A Novel DSR-based Protocol for Small Reconnaissance UAV Ad Hoc Network[J].Applied Mechanics and Materials,2014,568-570(07):1272-1277.
[28]Hyland M T,Mullins B E,Baldwin R O,et al.Simulation Based Performance Evaluation of Mobile Ad Hoc Routing Protocols in a Swarm of Unmanned Aerial Vehicles[C].Proceedings of 21st International Conference on Advanced Information Networking and Applications Workshops,IEEE Computer Society,2007.
[29]Shirani R,St-Hilaire M,Kunz T,et al.The Performance of Greedy Geographic Forwarding in Unmanned Aeronautical Ad Hoc Networks[C].Proceedings of 9th Annual Communication Networks and Services Research Conference,IEEE Computer Society,2011.
[30]Lin L,Sun Q,Li J,et al.A Novel Geographic Position Mobility Oriented Routing Strategy for UAVs[J].Journal of Computational Information Systems,2012,56(08):709-716.
[31]Biomo J D,Kunz T.Routing in Unmanned Aerial Ad Hoc Networks:a Recovery Strategy for Greedy Geographic Forwarding Failure[C].Proceedings of IEEE WCNC’14 Track 3(Mobile and Wireless Networks),2014.
[32]Shi X B,Wang F.A Routing Algorithm for UAV Ad Hoc Networks Multimedia Data Transmission[J].Journal of Shenyang Aerospace University,2012,29(02):32-36.
[33]Bo Z,Hengyang Z,Baoliang W,et al.Load Balancing Geographic Routing Strategy for Aeronautical Ad Hoc Networks[J].Journal on Communications,2016,37(12):67-76.
[34]Hyeson S,Kim K,Yang S.A New Geographic Routing Protocol for Aircraft Ad Hoc Networks[C].IEEE AIAA 29th Digital Avionics Systems Conference(DASC),2010.
[35]Lin L,Sun Q B,Wang S G,et al.A Geographic Mobility Prediction Routing Protocol for Ad Hoc UAV Network[C].IEEE Globecom Workshops,2012.
[36]Liu Z,Xu Z.Geographic Load Aware Routing Algorithm for Highly Dynamic Airborne Networks[J].Journal of Beijing University of Aeronautics and Astronautics,2014,40(12):1697-1701.
[37]Zang C,Zang S.Mobility Prediction Clustering Algorithm for UAV Networking[C].GLOBECOM Workshops IEEE,2011:1158-1161.
[38]Konstantopoulos C,Gavalas D,Pantziou G.A Mobility Aware Technique for Clustering on Mobile Ad-hoc Networks[C].Proceedings of the 8th International Conference on Distributed Computing and Networking,2006:397-408.
[39]Kesheng L,Jun Z,Tao Z.The Clustering Algorithm of UAV Networking in Near-space[C].8th International Symposium on Antennas,Propagation and EM Theory,2008:1550-1553.
作者简介:
王旭东,陆军工程大学通信工程学院硕士,主要研究方向为Ad-Hoc网络;
米志超,陆军工程大学通信工程学院副教授,博士,主要研究方向为宽带网络与交换技术;
王 海,陆军工程大学通信工程学院教授,博士,主要研究方向为宽带网络与交换技术。
(本文选自《通信技术》2018年第九期)
声明:本文来自信息安全与通信保密杂志社,版权归作者所有。文章内容仅代表作者独立观点,不代表安全内参立场,转载目的在于传递更多信息。如有侵权,请联系 anquanneican@163.com。
