先进战斗管理系统(ABMS)是美空军为响应美军联合全域指挥控制顶层设计,牵头开发的一种适应联合全域作战的指挥控制系统,也是目前美军联合全域指挥控制中惟一成型并投入实验的指挥控制系统。尽管其并未形成完全的作战能力,但是已经具备跨域融合的特征,并可实现一定范围内多域作战单元的有效连通和信息交换,是美空军发展联合全域指挥控制的重要手段。

先进战斗管理系统概念图
其意义不仅在全域作战单元的互联,还在于对持续演进的空战模式的赋能,特别是该系统及其构建的战场物联网赋能空空导弹网络化作战,其全域连通的传感器网络、可使信息优势转化为决策优势的指挥控制能力及性能优异的通信网络等要素,十分符合空空导弹网络化作战中的需求,可实现快速发现目标、发射后不管及远程打击。
空空导弹网络化作战的原理
空空导弹网络化作战缘起于美空军为适应未来高烈度空战、提升己方载机的生存性能、利于载机有富余时间执行更多任务需求,在中继平台的作用下大幅提升己方空空导弹的打击范围,保障中远程空空导弹实现有效打击。为空空导弹提供中继作用的平台往往具有一定的战场态势感知能力及探测能力,因此中继平台的前出可为己方载机扩展活动范围。
空空导弹网络化作战要素包括火控方式、数据传输及保障等多个环节。
空空导弹网络化作战火控方式简介。按照机载雷达是否开机进行分类,其火控方式可分为静默状态和非静默状态。其中,静默状态是指机载雷达完全不使用或不使用雷达主瓣探测目标进行打击的工作方式。此时,目标信息搜集、火控解算、导弹制导均由中继平台完成,并传递至载机及导弹。其优势是避免己方因雷达辐射信号过大而暴露,其缺陷是过度依赖中继平台,在对手破坏关键节点以实现破网断链的作战中受影响较大。
非静默状态则需载机利用其雷达主瓣在导弹发射之初照射目标,引导空空导弹进行打击。一旦载机因雷达跟踪目标丢失或需执行其他作战任务而不得不退出进程时,中继平台以接力方式继续为导弹提供引导直至命中目标。非静默状态中,载机可以作为中继平台的中继站引导导弹进行攻击,也可实现发射后完全由中继平台引导。
空空导弹网络化作战的数据传输。目前,空空导弹网络化作战需要的数据传输基于数据链进行。美国AIM-120C中远程导弹装配有单向数据链,可在较远距离上实现数据传输及引导,但载机却无法在较远距离上评估导弹毁伤效果。因此,美军为最新的AIM-120D导弹装配了双向数据链。欧洲多国联合研发的“流星”中远程空空导弹也装配有双向数据链,在理论上完全具备“A射B导”及毁伤评估的能力。在美国及北约盟国全面铺开Link16、Link22等数据链的背景下,美军及北约战机完全可凭借装配有双向数据链的导弹,结合载机、其他中继平台开展空空导弹网络化作战,以实现某种意义上的“发射后不管”。

德国空军“台风”战机和“流星”空空导弹
空空导弹网络化作战的保障。目前,空空导弹网络化作战离不开中继平台对导弹的引导和传感器网络的态势感知作用。这些平台可以是另一架战机,也可以是无人机、预警机、战场监视飞机或陆基通信节点、海上的舰船等,作为前出部分,承担对敌方目标的侦测及作为传感器节点的态势感知任务,并将搜集到的数据传递至任务载机,在整个作战流程中起着信息传递、接力制导等作用,为导弹在长距离奔袭后仍能准确命中目标提供了重要保障。随着战场物联网的逐步搭设、传输带宽的增大及传输时延的进一步降低,中继平台保障空空导弹网络化作战的作用会进一步凸显。
另外,传感器网络提供的态势感知同样至关重要,它们是空空导弹网络化作战的“耳目”,其各节点还可以兼顾中继平台的功能,实现对空空导弹网络化作战的保障。在联合全域作战背景下,极大提升了作战的范围及精确度。
先进战斗管理系统赋能
空空导弹网络化作战的机理
先进战斗管理系统缘起于美空军对E-8战场监视飞机的升级,源自“战斗云”的构建,由传感器、数据管理、通信网络、效应器(打击单元)四部分组成,通过对多域范围内各作战单元传输数据的整合,达到了类似“网关”的作用,在一定程度上打破了原有壁垒,改变了美军各军种、部分作战单元之间因数据标准、格式不兼容而无法交互信息的现状。
空空导弹网络化作战整个流程及参与要素与先进战斗管理系统契合度高,符合美国防部《联合全域指挥控制(JADC2)战略摘要》明确的“感知、理解和行动”3项联合全域指挥控制关键能力。先进战斗管理系统通过传感器到通信网络和数据管理组成的数字基础设施这一路径,结合采用的人工智能、云计算等技术实现对全域传感器的数据采集、分析,最终形成决策优势,赋能至效应器网络实现效果,是先进战斗管理系统赋能空空导弹网络化的核心机理。从关系上看,基于联合全域作战体系及网络的空空导弹网络化作战包含于先进战斗管理系统的应用前景部分。
传感器赋能空空导弹网络化作战。先进战斗管理系统的建设目标之一是整合多域范围内的各传感器,实现数据交换,为空空导弹网络化作战提供必要支撑。这些传感器是具有多种感知手段的战机、预警机、战场监视飞机及无人机等。战机主要聚焦具有传感器功能、具备一定协同能力的有人作战飞机,以覆盖射频、红外和激光等各种频谱传感器,并可凭借AN/ASQ-239系统、AN/APG-81雷达实现一定的协同作战及引导能力;预警机不仅承担传感器功能,还可作为空空导弹网络化作战的“中继器”。目前,美军及北约较为依赖E-2D、E-3、E-7等预警机作为传感器节点。以美军E-2D预警机为例,该机凭借AN/APY-9雷达、协同交战能力(CEC)的采用,实现了对驱逐舰发射“标准-6”反导导弹、舰载机发射AIM-120空空导弹的引导,并可与舰载机雷达、舰载宙斯盾系统实现“组网”形成传感器网络;美军E-7预警机还可作为联合全域指挥控制节点实现与天基传感网络的通联,实现对导弹发射的预警。除传统预警机外,“忠诚僚机”等技术的兴起使得具有一定态势感知能力的无人机成为空空导弹网络化作战的传感器平台,波音公司XQ-58A无人机自设计之初便考虑模块化以携带包括大型传感器在内的多种有效载荷;已正式进入美海军的MQ-25、MQ-9等无人机也可通过额外携带传感器吊舱等方式实现态势感知功能。

美军E-2D预警机
另外,伴随先进战斗管理系统对其他域传感器的进一步关联,未来将出现陆基雷达、海基舰船为作战提供目标信息,并由空中“中继器”完成引导的情况。
数据管理赋能空空导弹网络化作战。数据管理是先进战斗管理系统的重要环节,是系统面对海量数据实现合理处置的关键。空空导弹网络化作战过程中,受制于导弹体积、重量等多种因素限制,导弹本身不具备复杂的数据处理设施及能力,目标探测、火控解算、引导所需的数据搜集及处理等需要由载机或“中继器”来完成数据管理工作。数据管理基于人工智能、云计算及新的网络安全策略等多项技术,其任务是管理不同传感器获取的来源复杂、类型多样、不同安全等级的数据,提供可兼容的数据架构,利用人工智能等技术实现对数据的分析并形成决策优势,将相关信息分发至各作战单元,实现指挥控制目标进而加速OODA循环。当前,数据管理主要由可搭载较多设备的预警机、为可携带较多额外载荷的大型飞机(如加油机)添加吊舱、整合多家科研机构定义相关标准并研发满足数据管理需求的设备完成的,所产生的信息由其他作战单元进行接力传输。
通信网络赋能空空导弹网络化作战。由于空空导弹网络化作战衍生自网络中心战思想,其整个流程离不开有效的通信网络。先进战斗管理系统要求通信网络在连通性和数据/网络安全方面具备较好性能。
通信网络的作用包含两个部分,第一部分是通信网络对导弹打击目标时的赋能,第二部分是通信网络对载机、中继器的赋能。
其中,通信网络对导弹打击目标过程的赋能是依靠数据链完成的。目前,美国与北约使用的Link16、Link22数据链互相兼容,抗干扰性能较好,且Link22数据链克服了Link16必须进行中继才能进行超视距传输的缺陷,并具备一定的抗电子战系统攻击的能力。美军还正在发展适用于F-35、XQ-58A等隐身飞机的多功能先进数据链(MADL),该数据链可实现隐身飞机之间的数据交互,被截获概率较低。另外,美军还计划在一些重要的非隐身平台节点(如E-2D、E-3预警机)也装配多功能先进数据链以实现与隐身飞机的通联。与专用于F-22战机的飞机编队间数据链(IFDL)类似,多功能先进数据链的缺陷在于为保证隐身飞机生存性,只能进行一对一通信,且多功能先进数据链不可与飞机编队间数据链直接联络。在隐身战机执行空空导弹网络化作战中,目前仍较为依赖Link16/Link22数据链。

数据链作用示意图
在传统模式中,网络安全往往难以适应可变化、兼容多作战域传感器的情况。因此,先进战斗管理系统对通信网络构建瞄准开放式架构、软件无线电等新技术,要求信息安全机制的改变采用零信任安全策略:改变传统的基于网络为中心构建防护的策略,逐渐转向加密数据并通过设置访问控制及验证手段保证安全性。这种要求是基于各作战域平台受制于军种数据标准及安全设置产生不同类型及不同安全等级的数据的现实,而在短时间内又无法完全统一标准的情况下,在确保内部通联及整体安全性的前提下,需要上述手段实现多作战域、多任务伙伴之间的信息交互,最大限度实现多域传感器的对接。
效应器与空空导弹网络化作战。先进战斗管理系统的效应器就是参与作战的火力输出要素,空空导弹网络化作战中的效应器就是载机及其发射的空空导弹,它们接受经过传感器网络搜集、通信网络传输、数据管理整合分析形成的决策信息,并及时回传信息,较好契合了美国防部《联合全域指挥控制战略摘要》中有关“推进与任务伙伴信息共享的现代化”的内容,改变了以往载机利用雷达探测/制导、导弹利用无线电指令修正并在末端主动探测的模式,达到超视距空战中“先敌发现,先敌开火”的要求。
另外,当前空空导弹网络化作战还停留在初步实验阶段,离先进战斗管理系统提到的任务伙伴之间的无缝衔接仍有一定距离,这是由传输时延、坐标系转换及建立基准坐标系等空空导弹网络化作战的原理因素造成的。
先进战斗管理系统赋能
空空导弹网络化作战的发展
先进战斗管理系统的建设是一项极其复杂的系统工程,包含多个子系统,涵盖硬件及软件研发。其发展预计分为三个阶段:当前即第一阶段主要聚焦形成传感器与效应器整合、通信网络升级及作战系统的初步整合;第二阶段将围绕传感器和软件大规模集成展开;第三阶段则聚焦新型通信网络的构建。
当前,空空导弹网络化作战基本停留在“A射B导”模式,离设想中的各种交战模式还有很大差距,后期也将随着以上三个阶段的发展而发展。
中继平台多元化。未来空空导弹网络化作战将在先进战斗管理系统赋能下呈现中继平台多元化的特性,改变目前仍由另一架战机或大型预警机引导的模式。
中继平台多元化主要体现在以下几个方面:一是在中继平台型号种类多。二是原本与中继任务关联不大的加油机等飞机通过吊舱搭载模式加入作战行列。波音公司计划为KC-46A加油机加装通信吊舱以使与本不兼容的F-22与F-35战斗机平台实现双向数据连通能力。三是发展以忠诚僚机、加挂各种吊舱的现役无人机为代表的无人平台。美MQ-9无人机已发展出包括电子战、侦察、通信等多种吊舱,使得原本功能较为单一的无人机具备多种能力,以通用原子能公司为MQ-9无人机装配的“罗塞塔回声”(ROSETTA Echo)先进载荷(REAP)吊舱为例,该型吊舱可实现通信中继网络构建,并使用Link16数据链和特高频/甚高频无线电;MQ-25等无人机在研发之初便考虑模块化设计,即更换空中加油部分便可具备进行通信和电子战的能力。考虑到有人隐身战机并不适合承担中继任务,采用无人机可大大提升平台的隐蔽性,确保人员的安全。四是引入陆基雷达和舰船等其他作战域的传感器作为中继手段是实现中继平台多元化的终极目标。这是联合全域指挥控制的理想形态,但是对于目前技术手段而言难度极大。因此,发展具有完整功能、生存性更好的中继平台作为节点是未来空空导弹网络化作战的重要方向。
发展性能更优的数据交互手段。先进战斗管理系统的目标之一是发展性能更优的数据交互手段,以适应大规模组网、大容量传输和较低时延。否则,不但先进战斗管理系统的功能将大打折扣,其赋能空空导弹网络化作战的优势也将被抵消。
但目前使用的数据链在性能上仍有一定欠缺,不足以支持各种中继平台及空空导弹之间的数据传输需求,难以同时兼顾海量和实时性两大要素,不能很好地实现设想的作战目标。如目前美军常用的Link16数据链无法实现超视距传输,Link22数据链虽支持图像传输,但仅实现了“从无到有”的艰难跨越。各类隐身战机专用的数据链也存在数据类型不兼容,无法直接进行信息交互的问题。
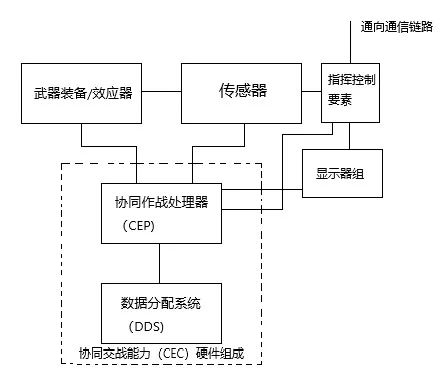
协同交战能力结构图
与协同交战能力对接。自20世纪末起,美海军就着重发展协同交战能力(CEC),这是一种整合舰船编队协同作战实现超视距打击等任务的能力,是美军联合作战能力的雏形,也是当今分布式海上作战等概念的基础。其机理是通过整合不同性能、不同工作范围雷达所搜集的数据,为一个编队提供整体的态势感知,以支持编队执行多种作战任务,并实现编队范围内几艘舰船对拦截导弹的接力引导。协同交战能力具备联合全域指挥控制的要素,与美军打通军种、任务伙伴及装备之间隔阂的目标不谋而合,与先进战斗管理系统的很多目标是一致的。因此,要想实现先进战斗管理系统与协同交战能力的对接,仅需完善协同交战能力所采用的通信设备及通信模式,在升级装备性能的基础上提升反制电子战能力、打通海军与其他军种的隔阂即可。
但以目前技术手段看,利用舰船直接引导空空导弹的难度极大。但是协同交战能力与空空导弹网络化作战中的中继器、载机的对接并不难以实现,其对接也符合先进战斗管理系统乃至更大的联合全域指挥控制的需求。
结 语
目前,先进战斗管理系统对空空导弹网络化作战的赋能依旧体现在传感器网络到载机这一过程,仍采用现有数据链和各类中继平台引导导弹摧毁目标。一旦这项应用更加成熟,空空导弹网络化作战的应用场景将更加广泛,将大幅降低战机与导弹之间数据传输的技术兼容难度。
版权声明:本文刊于2023年 9 期《军事文摘》杂志,作者:郝泽澳、刘威,如需转载请务必注明“转自《军事文摘》”。
声明:本文来自军事文摘,版权归作者所有。文章内容仅代表作者独立观点,不代表安全内参立场,转载目的在于传递更多信息。如有侵权,请联系 anquanneican@163.com。
