*本文来自轩辕实验室杨杰森的研究成果和学习笔记。
01-概述
本文讨论了深度学习方案在欺骗检测中的应用。特别是,在存在和欺骗信号不存在的情况下,所谓的交叉模糊函数(CAF)的特征被用来训练一组数据驱动的模型,提供一个概率分类。该方法在每颗卫星的基础上运行。结果表明,复杂的神经网络能够有效地捕捉到欺骗攻击的性质。特别是,本文考虑了一种多层感知器(MLP)和两类卷积神经网络(CNNs),并通过模拟数据进行了验证。
02-GNSS欺骗检测
在一个欺骗攻击发生时,受害者天线处接收到的所有信号为:
其中 是接收到的GNSS信号, 是接收到的欺骗GNSS信号, 是噪声,t是t时刻。
检验两种假设:
1.零假设(H0),即存在合法的信号和噪声,但没有欺骗信号。
2.另一种假设(H1),即合法信号、欺骗信号和噪声都存在于数据集中;
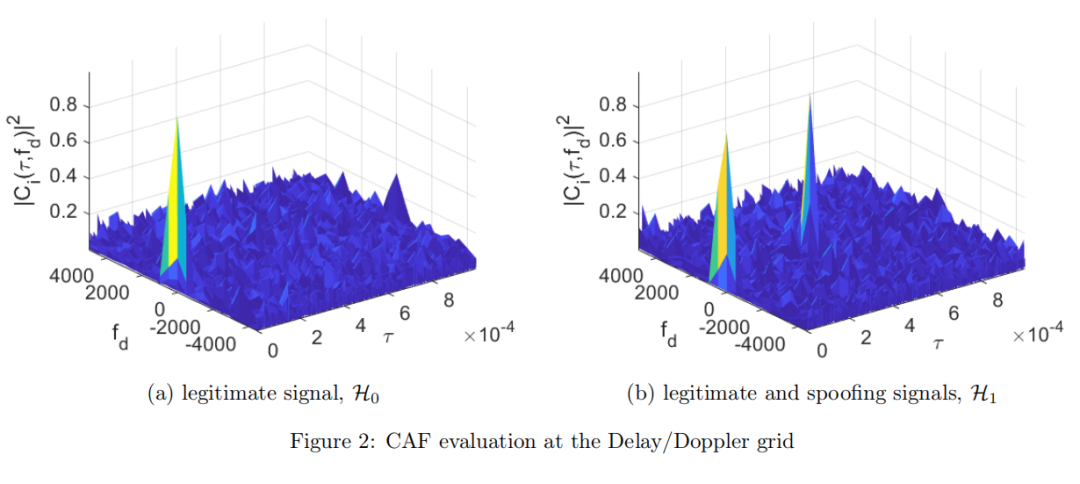
CAF可以计算为数字信号与第i颗卫星的已知局部代码的相关性。在给定的延迟/多普勒对的情况下:

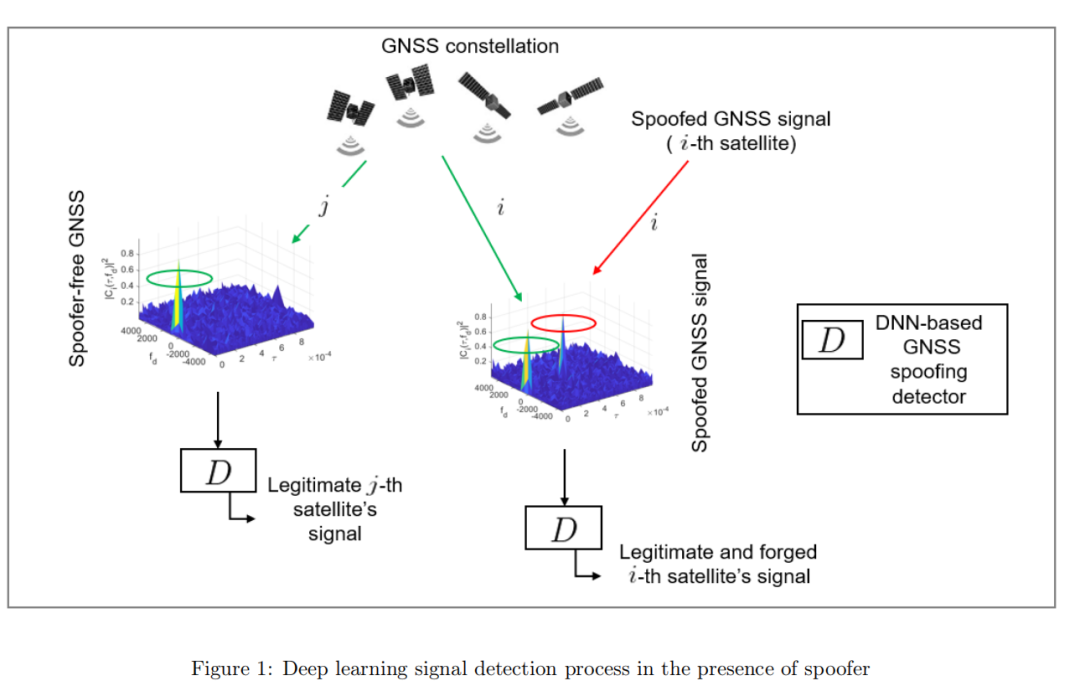
欺骗信号对CAF的影响是众所周知的,如图2所示。为了清晰起见,在两个假设下显示任意CAF。这项工作提出训练一个DNN,数据驱动的模型,以学习分类之间的欺骗或干净的信号接收。
03-深度神经网络模型
MLP网络
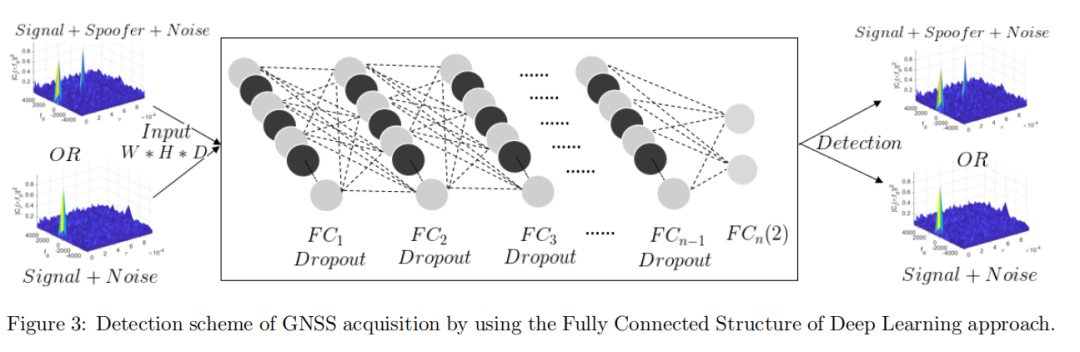
本研究将使用的第一个神经网络结构是多层感知器(MLP),它被称为传统的神经网络。这种类型的网络由一个或多个层的神经元(由一排神经元组成)组成,图3显示了这种类型的网络的示例性表示。第一层被称为输入层,它被输入训练数据集,用于学习没有直接暴露于输入的(可能的几个)隐藏层的参数。在训练过程中,隐藏层中的节点数被随机忽略或“退出”,如图中的黑色所示。3.最后一层神经元的数量取决于一个人想要分类的类的数量,因为这些类提供了它们的概率。
CNN网络
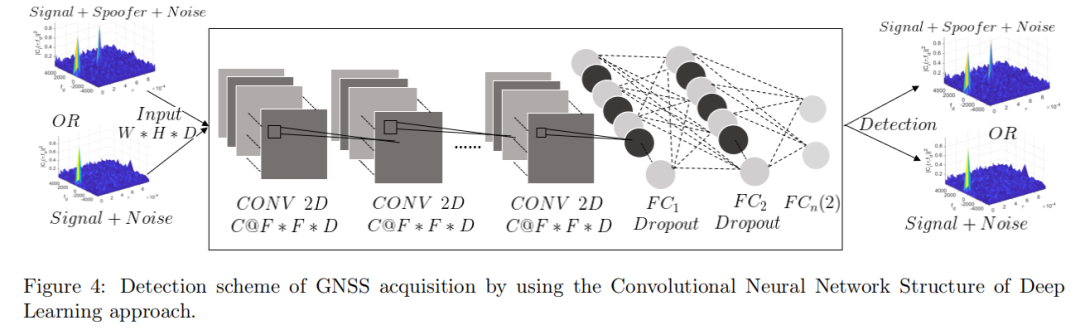
这里考虑的第二种人工神经网络结构是所谓的卷积神经网络(CNN),它是在从图像数据集学习类标签的上下文中最流行的深度学习模型之一,一个CNN可以有数十或数百层,每一层都学会识别图像[19]的不同特征。在每一层上,滤波器被应用于每个训练图像,并且每个卷积图像的输出被用作对下一层的输入。图4说明了一个CNN的结构。在训练过程中,CNN的输入大小是固定的,输入是通过一个具有相同或不同滤波器大小的卷积层的堆栈。在每个卷积层中,滤波器通过使用2像素大小的步幅将输入图像从左到右扫描到向下,该步幅是滤波器每次移动时的像素数。最后,卷积层之后是完全连接(FC)层和最后一个软max层,用于分类目的。
网络的输入是在延迟/多普勒网格上评估的CAF,它可以被认为是一个图像。这些图像(见图。2)具有某些特征,可以用来确定信号是否存在:i)在没有欺骗信号的情况下,图像应该显示一个对应于合法的单峰卫星信号(如果接收到足够的功率);ii)在存在欺骗信号的情况下,CAF图像应该由两个峰和剩余单元中指数分布的噪声组成。这被用来训练一个神经网络模型来在 和 之间进行分类,即前面描述的假设。
04-仿真环境及仿真结果
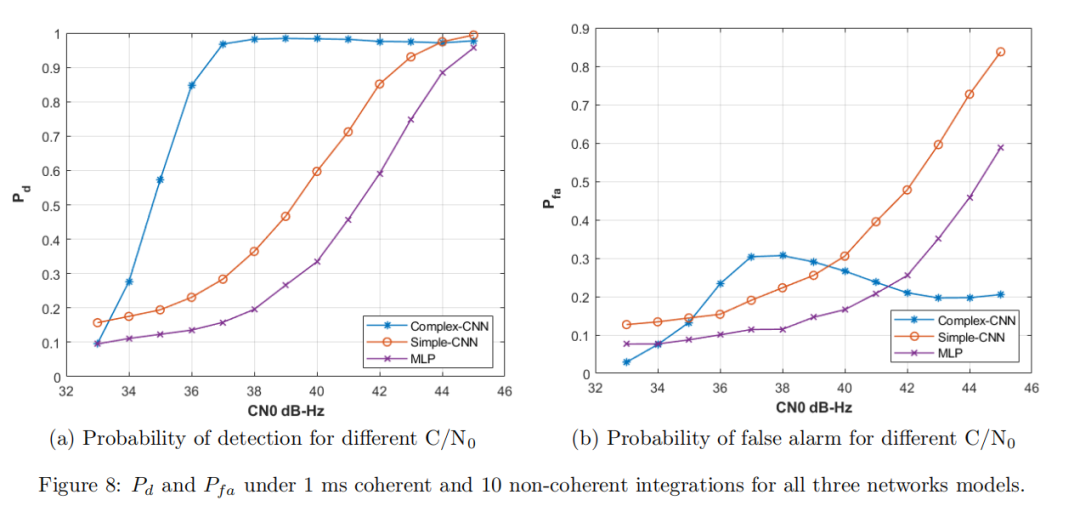
为了实现这个目标,我们使用合成生成的数据来训练dnn。特别是,我们使用了一个由10000个I&Q样本快照组成的数据集,不同的**载波-噪声密度比(C/N0)**在33到45分贝赫z之间变化,以及在0到1ms和-4000到4000赫z之间随机生成的多普勒位移。然后处理这些样本,以计算多普勒延迟网格上的CAF。一个类似于图像的例子就可以为这些CAF制作,其中每个多普勒/延迟单元是一个像素,其值是CAF。例如,如果考虑有20个多普勒箱获得GPSL1C/A信号,则这些图像将为20×1023维。**这些图像被输入到DNN的输入层,其输出将被分类为欺骗卫星信号的存在/缺失。**在一个有监督的训练方案中,这些输入/输出对是通过标记和使用上述合成数据生成来提供的。实验采用ReLU激活函数和两种不同的优化方法,用动量(SGDM)和Adam优化器训练网络随机梯度下降。在这项工作中,我们将考虑两种不同的神经网络结构:多层感知器(MLP)和卷积神经网络(CNN)。
部分结果如图8所示。
05-总结
本文提出了一种检测欺骗攻击的DNN方法。一般来说,欺骗攻击很难建模和抵消。在这种情况下,如果有足够的训练数据,数据驱动的方案就会变得有用。本文利用CAF延迟/多普勒图作为DNN的输入来探索这种分类方法。特别是对几种神经网络模型进行了训练,并比较了其在检测和误警概率方面的性能。结果显示了良好的性能,特别是更复杂的NNs,能够捕获欺骗攻击的性质及其对CAF地图的影响。
声明:本文来自轩辕实验室,版权归作者所有。文章内容仅代表作者独立观点,不代表安全内参立场,转载目的在于传递更多信息。如有侵权,请联系 anquanneican@163.com。
